රොබෝ වෙල්ඩින් කිරීමේ වෙල්ඩින් බලපෑම බොහෝ අංශවලින් බලපායි. බොහෝ ගනුදෙනුකරුවන් වෙල්ඩින් රොබෝවරුන් භාවිතා කිරීමට ප්රවීණ වීමට පෙර අඩු වැඩි වශයෙන් ගැටළු වලට මුහුණ දෙනු ඇත. මූලික වශයෙන්, මෙම ගැටළු ඇති වන්නේ නුසුදුසු ක්රියාකාරිත්වය හෝ නුසුදුසු රොබෝ සැකසුම් නිසා වන අතර, ඒවා සුදුසු ගැලපීම් සමඟ විසඳා ගත හැකිය. ඊළඟට, යුන්හුවා වෙල්ඩින් රොබෝවරුන් භාවිතා කිරීමේදී බොහෝ විට සිදුවන ගැටළු කිහිපයක් සහ ඒ ආශ්රිත විසඳුම් පිළිබඳව සංස්කාරකවරයා ඔබව දැනුවත් කරනු ඇත.
1. වෙල්ඩින් කිරීමේදී අසාර්ථක චාප ආරම්භය
1. චාපය තවමත් ආරම්භ වී නැත.
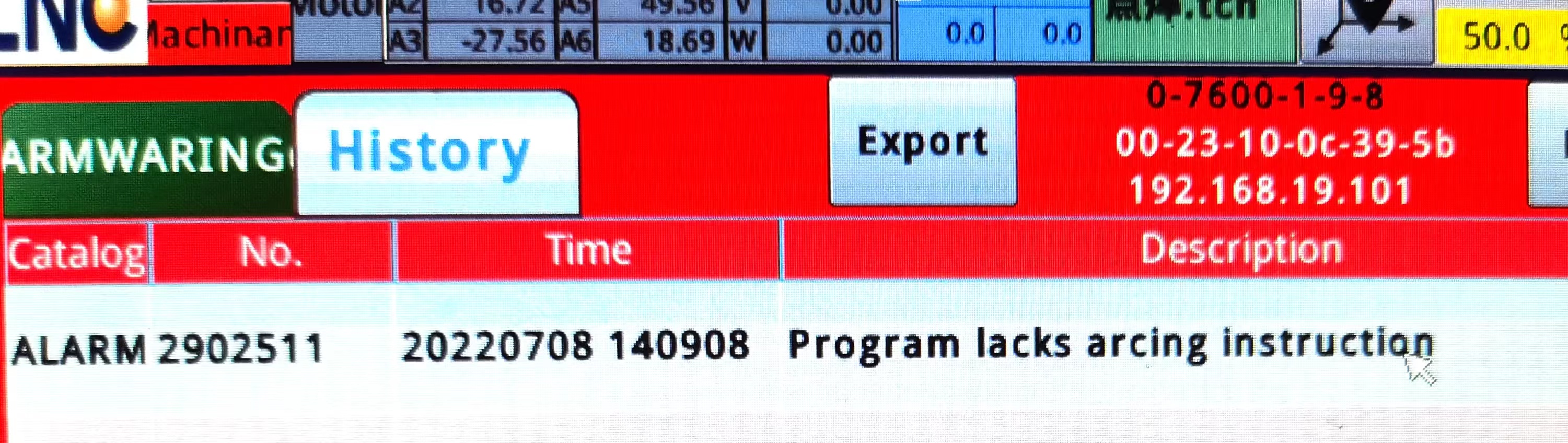
හේතුව: සංස්කරණය කරන ලද වැඩසටහනේ arc ending විධානය ක්රියාත්මක කිරීමට පෙර අනුරූප arc ආරම්භක විධානයක් නොමැත.
සැකසුම් ක්රමය: තවත් චාප අවසන් කිරීමේ විධානයක් හෝ අඩු චාප ආරම්භක විධානයක් එකතු කරන්නේ දැයි පරීක්ෂා කරන්න.
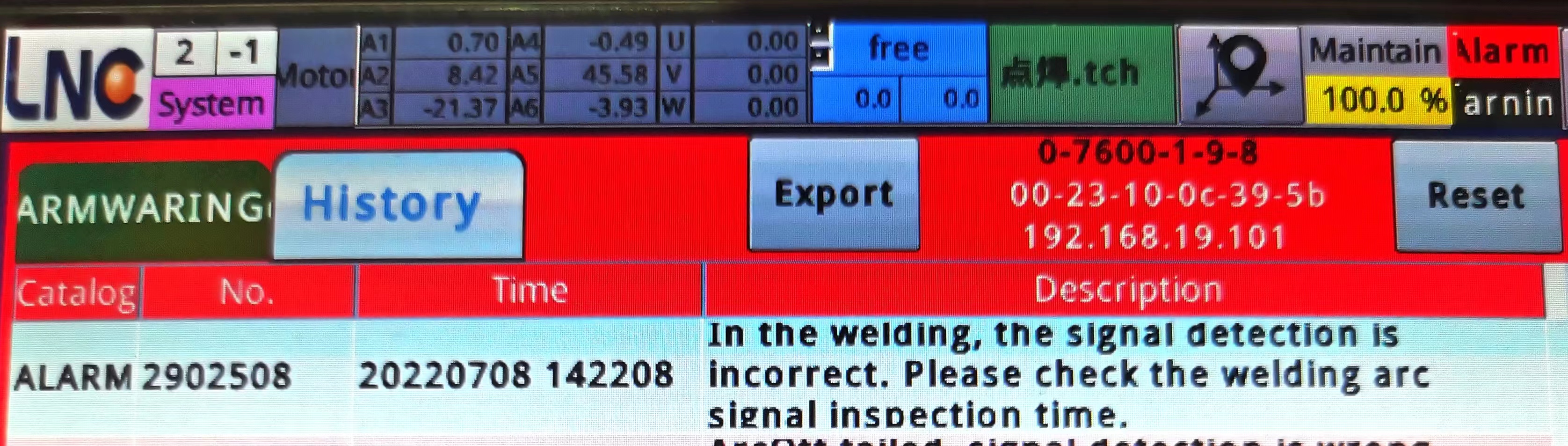
2. චාපය ආරම්භ කිරීමට අසමත් විය, සංඥා අනාවරණය වැරදියි.
ප්රවේශය:
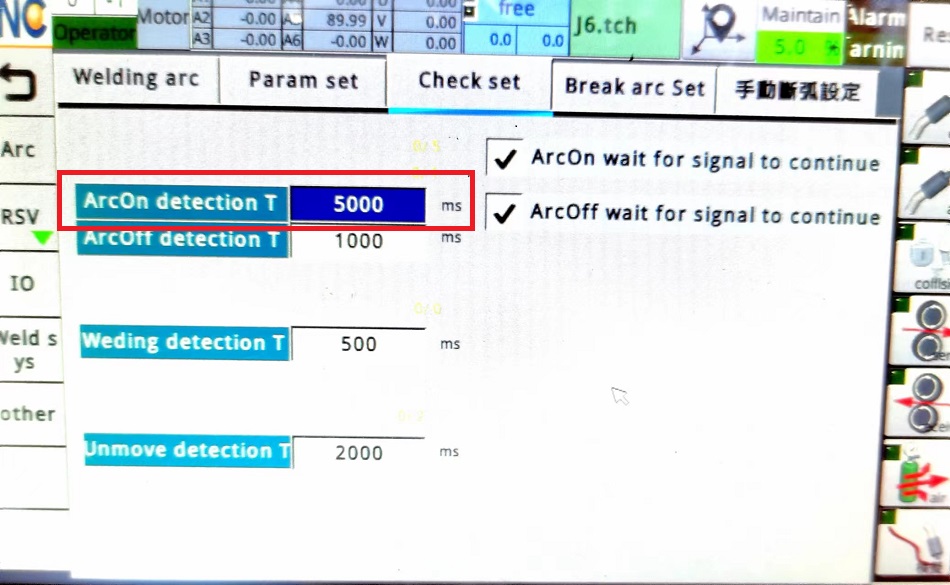
1) පරාමිති පිටුවේ වෙල්ඩින් බාධා කිරීමේ කාල සැකසුම පරීක්ෂා කරන්න. සාමාන්යයෙන්, කාලය 5000ms ලෙස සැකසීම සුදුසුය.
2) වෙල්ඩින් යන්ත්ර සංඥාව පද්ධතියට සාර්ථකව සම්ප්රේෂණය වී ඇත්දැයි පරීක්ෂා කරන්න.
3) වැඩ කොටස පදනම් වී ඇත්දැයි පරීක්ෂා කරන්න
3. ආර්ක් ෆ්රයිඩ් වයර්
හේතුව:
1) ධාරාව සහ වෝල්ටීයතාව නොගැලපීම
සැකසුම් ක්රමය: වැඩ කොටසෙහි සහ වෙල්ඩින් යන්ත්රයේ සැබෑ ඝණකම අනුව සුදුසු ධාරාව සහ වෝල්ටීයතාවය අපි සකස් කළ යුතුය.
2) වෙල්ඩින් වයරයේ දිග වැඩියි
ප්රතිකාර ක්රමය: සාමාන්යයෙන්, වෙල්ඩින් වයරයේ දිග වෙල්ඩින් වයරයේ විෂ්කම්භය මෙන් 10 සිට 15 ගුණයක් වන අතර, වෙල්ඩින් වයරයේ විෂ්කම්භය අනුව සුදුසු වෙල්ඩින් වයරය තෝරා ගනු ලැබේ.

ඉතා අඩු ධාරාවක් අසමාන වෑල්ඩින් වලට මග පාදයි.

සාමාන්ය ධාරාව සහ වෝල්ටීයතාවය, අලංකාර සහ ස්ථිර වෑල්ඩය

වෙල්ඩින් පන්දමේ කෙළවර වයරය බෝලය කරයි

සාමාන්ය වෑල්ඩින් කිරීමෙන් පසු වෙල්ඩින් පන්දම් කෙළවර වයරය හොඳ තත්ත්වයේ පවතී.
4. චාපයෙන් පසු ස්වයංක්රීය චාප නිවා දැමීමේ සංසිද්ධිය සිදු වේ
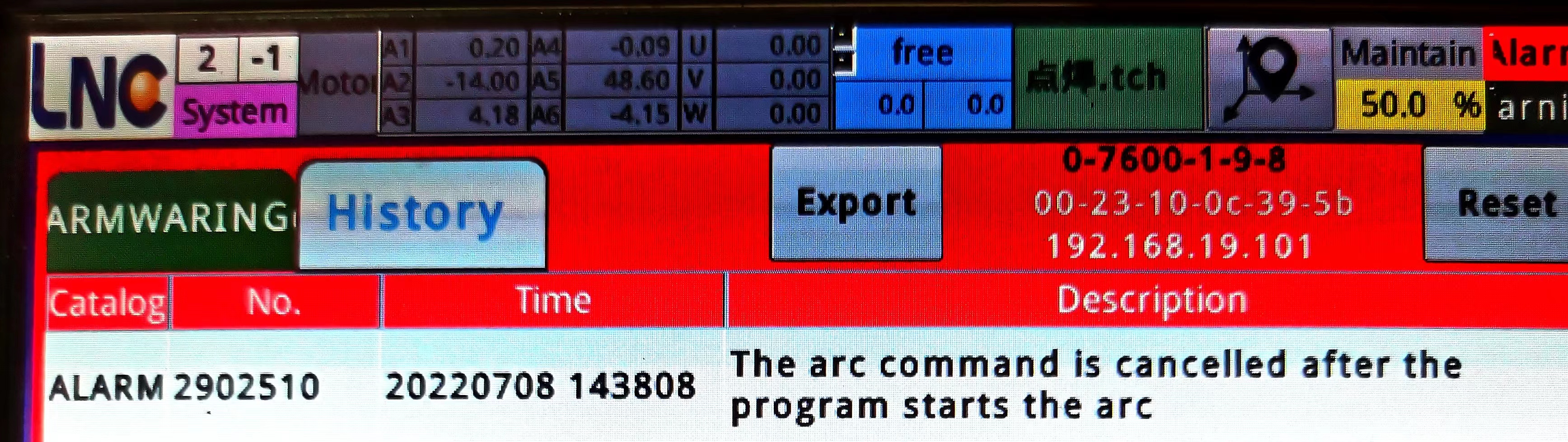
විසඳුම: පරාමිති වේලාව චලනය නොවන වේලාව සැකසීමේ ගැටලුවක් තිබේදැයි පරීක්ෂා කරන්න, සහ වෙල්ඩින් පන්දම චලනය වී ඇත්දැයි පරීක්ෂා කරන්න.
2. වෑල්ඩින් කිරීමේදී චාප බිඳීමක් සිදු වේ
හේතුව:
1. වෙල්ඩින් වයරය වැඩ කොටස ස්පර්ශ නොකළහොත්, චාප බිඳීමේ අනතුරු ඇඟවීම ක්රියාත්මක වේ.
ප්රතිකාර ක්රමය: වෙල්ඩින් ක්රියාවලියේදී වෙල්ඩින් වයරය වැඩ කොටස සමඟ සම්පූර්ණයෙන්ම සම්බන්ධ වන පරිදි වෙල්ඩින් වයරයේ සහ වැඩ කොටසෙහි පිහිටීම නැවත සකස් කරන්න. (නමුත් එය වැඩ කොටසට ඉතා සමීප නොවිය යුතුය, එය වැඩ කොටස හරහා වෑල්ඩින් කිරීමට හේතු විය හැක)
2. අසාධාරණ වෙල්ඩින් මාර්ගය නිසා ගැටීම හේතුවෙන් තුවක්කු හිස ස්වයංක්රීයව ඉහළට නැඟේ.
විසඳුම: වෙල්ඩින් මාර්ගය නැවත සකසන්න
3. වෙල්ඩින් යන්ත්රයේ ධනාත්මක සහ සෘණ වයර් දුර්වල සම්බන්ධතාවකින් පවතී.
ප්රතිකාර ක්රමය: ධනාත්මක සහ සෘණ වයර්වල රැහැන් තත්ත්වය පරීක්ෂා කරන්න.
3. වෑල්ඩින් කිරීමෙන් පසු චාප අවසානය අසාර්ථක වීමට හේතු
1. චාප අසමත් වීම, සංඥා හඳුනාගැනීමේ දෝෂය
හේතුව: වෙල්ඩින් යන්ත්රයට රොබෝවරයාගෙන් සංඥාව නොලැබුණු අතර, එම නිසා රොබෝවරයා චාපය වැසීමට අසමත් විය.
ප්රවේශය:
(1) සැකසුම් පරාමිතීන් සාධාරණ දැයි පරීක්ෂා කරන්න
(2) IO සංඥාව පරීක්ෂා කර, අවසන් ලක්ෂ්යය I හි සංඥාව අසාමාන්ය දැයි පරීක්ෂා කරන්න. I ලක්ෂ්ය සංඥාව දිගටම ක්රියාත්මක වේ නම්.
(3) මාර්ගයේ කෙටි පරිපථයක් තිබේද සහ බිම් වයරය අසාමාන්ය ලෙස සම්බන්ධ වී තිබේද යන්න පරීක්ෂා කරන්න.
2. චාප පහරින් පසු චාප නැවතුම් විධානයක් සකසා නොමැත.

හේතුව: මෙම අනතුරු ඇඟවීම ඉගැන්වීමේ පෙන්ඩනයේ ඇති වූ විට, ඔබට චාප අවසන් කිරීමේ විධානය එක් කිරීමට අමතක වී ඇත්දැයි පරීක්ෂා කරන්න.
සැකසුම් ක්රමය: වැඩසටහනේ චාප ආරම්භක විධානයට පසුව චාප අවසන් කිරීමේ විධානයක් එක් කරන්න.
මෙම ගැටළුව ප්රධාන වශයෙන් වෙල්ඩින් ක්රියාවලියේදී යුන්හුවා වෙල්ඩින් රොබෝවරයාගේ චාප-ආරම්භක, චාප-බිඳීමේ සහ චාප-අවසන් කිරීමේ ආශ්රිත ගැටළු හඳුන්වා දෙයි. පරිශීලකයින්ට භාවිතයේදී එවැනි ගැටළු ඇති වුවහොත්, ඔවුන්ට විසඳුම් වෙත යොමු විය හැකිය. ඒවා විසඳිය නොහැකි නම්, කරුණාකර නියමිත වේලාවට යුන්හුවා කාර්මිකයන් අමතන්න. උදව් කරන්න.
ඔබට Yunhua Robot හි වඩාත් පොදු ගැටළු සහ විසඳුම් දැන ගැනීමට අවශ්ය නම්, කරුණාකර Yunhua Robot නිල ගිණුමට අවධානය යොමු කරන්න.
යුන්හුවා වෙල්ඩින් රොබෝ යනු ගෑස් ආවරණ වෙල්ඩින්, ආගන් චාප වෙල්ඩින්, ප්ලාස්මා කැපීම සහ ලේසර් වෙල්ඩින් වැනි බහු-ක්රියාකාරී වෙල්ඩින් ඒකාබද්ධ කරන ස්වයංක්රීය රොබෝවකි. එය ඉහළ නම්යශීලී බවක්, ශක්තිමත් අනුවර්තනයක්, කාර්යක්ෂම වෙල්ඩින් කාර්යක්ෂමතාවයක් සහ ස්ථාවර වෙල්ඩින් ගුණාත්මක භාවයක් ඇති අතර විවිධ ක්ෂේත්රවල බහුලව භාවිතා කළ හැකිය. යන්ත්රෝපකරණ නිෂ්පාදනය, මෝටර් රථ නිෂ්පාදනය, නිරවද්ය ඉලෙක්ට්රොනික උපකරණ සහ ගල් අඟුරු කැණීම සහ අනෙකුත් ක්ෂේත්ර වැනි.
පළ කිරීමේ කාලය: ජූලි-15-2022



